
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
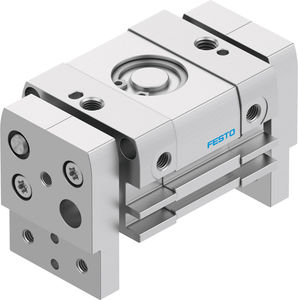
夹紧力: 27 N - 508 N
运行行程: 20 mm - 200 mm
... 当需要抓取和提升较大物体时,需要更大的开口和夹紧距离。新型长行程气爪 DHPL 精度高且重量轻,可在内部和外部抓取较大物体,是堆放箱子、抓取板和模塑零件或打开袋子的理想之选。 抓手夹爪有导轨,抗扭转性高 结构紧凑而坚固 适用于抓取较大零件 双作用活塞式执行机构 适用于外部和内部抓取 安装:通过螺纹直接紧固,带通孔 用于利用 T 型槽和圆形槽的接近式传感器进行位置感测 通过减少材料的使用实现可持续生产 ...
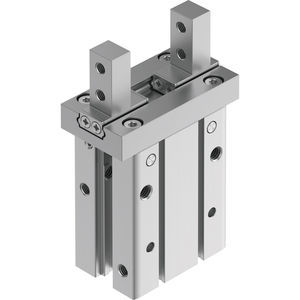
夹紧力: 10.4 N - 777.2 N
运行行程: 2 mm - 15 mm
... 这款市场上最紧凑的平行气爪具有令人印象深刻的抓取力和抓取精度,有多种派生型可选,可满足各种要求和应用。 高精度高韧性滚珠导轨 占地空间小,而抓取力大 重复精度高 可用作双作用或单作用气爪 单作用型或带抓取力保持功能,常开 (NO) 或常闭 (NC) 适用于外部和内部抓取 多种固定和安装方式 通过减少材料的使用实现可持续生产 ...
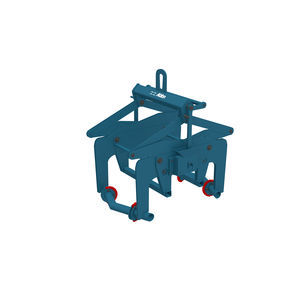
... 重量轻,适用于所有机型,并提供多种长度可选。 夹持部件由高度耐用的可更换橡胶金属条组成,这些条通过螺丝固定在底座上。 厚实的橡胶衬垫确保了对易碎混凝土制品的轻柔搬运。 两排橡胶金属条以及锥形下部橡胶表面,增强了对最底层砌块的夹持压力。 应用领域: 大型混凝土构件的堆垛。 每层均采用垂直钢带捆扎的铺路砖堆垛。 未进行垂直钢带捆扎或仅部分捆扎的铺路砖堆垛,且该砖块由单层机生产,抓取宽度不超过700毫米,最小厚度为60毫米。 仅限于未进行垂直钢带捆扎或仅部分进行垂直钢带捆扎的铺路砌块堆垛,且该砌块由多层机生产,抓取宽度超过700毫米,最小厚度为80毫米。 ...

... 重量轻,适用于所有机型,并提供多种长度可选。 夹持部件由高度耐用的可更换橡胶金属条组成,这些条通过螺丝固定在底座上。 厚实的橡胶衬垫确保了对易碎混凝土制品的轻柔搬运。 两排橡胶金属条以及锥形下部橡胶表面,增强了对最底层砌块的抓握压力。 应用领域: 大型混凝土构件的堆垛。 每层均采用垂直钢带捆扎的铺路砖堆垛。 未进行垂直钢带捆扎或仅部分捆扎的铺路砖堆垛,且该砖块由单层机生产,抓取宽度不超过700毫米,最小厚度为60毫米。 有限适用于未进行或仅部分进行垂直钢带捆扎的铺路砌块堆垛,且该砌块由多层机生产,抓取宽度超过700毫米,最小厚度为80毫米。 GB2-Z:橡胶元件固定在 ...
运行行程: 0 mm - 850 mm
... 一种重型设计,专为叉车抓斗开发,具有超深抓取深度,用于运输未垂直钢带捆扎的铺路砖。 应用范围: 适用于未用钢带垂直捆扎或仅部分垂直捆扎的铺路砖堆垛,这些砖块由单层生产机制造,夹持宽度最大为850毫米(33½英寸),砖块最小厚度为60毫米(2½英寸)。 对于未用钢带垂直捆扎或仅部分用钢带垂直捆扎的铺路砖堆垛,若其由多层机生产,且抓取宽度不超过850毫米(33½英寸)、砖块最小厚度为80毫米(3¼英寸),则该抓斗可有限度地使用。 更多信息 可快速更换为带2个螺栓的橡胶抓取条GB2-Z,并通过螺栓固定。 单根弹簧钢指片适用于几乎所有砖块形状,这意味着能够安全处理大多数产品。 ...

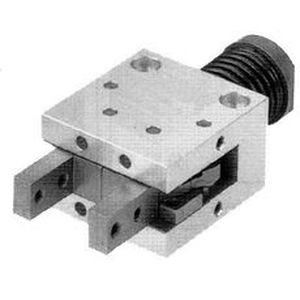
夹紧力: 30 N - 280 N
运行行程: 5 mm - 60 mm
... 这些是具有2个平行的长冲程钳口的夹持器。这种机械设计使它们适合于夹持大体积的零件。除最小的机械手外,所有机械手都可以安装一个伸缩式磁性接近传感器。 每包数量:0 最小订货量。0 计量单位:件 指示器: 处理孔径(毫米)。2x12 尺寸: 12 ...

夹紧力: 45 N
运行行程: 10 mm
... 这些是具有2个平行的长冲程钳口的夹持器。这种机械设计使它们适合于夹持大体积的零件。除最小的机械手外,所有机械手都可以安装一个伸缩式磁性接近传感器。 每包数量:0 最小订货量。0 计量单位:件 执行器。 处理孔径(毫米)。2x12 最大输入压力(巴)。008 最高温度(摄氏度):80 最小输入压力 (bar):03 最低温度 (°C): -10 ...

... 手动平推夹具应用广泛,可简单有效地夹持试样。通过双面平推设计,可以调整夹具开口以适应不同的试样厚度,确保试样受力和夹具体在同一轴线上。夹具可以配备各种尺寸的可替换夹面,并可以选择金属光面、橡胶涂层和锯齿等各种表面形式。 工作原理 2710-100系列双面平推设计可适用于最大46 mm(1.8 in)厚的试样,对不规则或非对称试样(例如搭接剪切和元件测试)进行补偿。夹具两侧的旋钮上都有滚花,便于手动拧紧,更高载荷的夹具还具有内六角螺钉旋钮,可使用六角扳手或扭矩扳手拧紧试样。夹具上带有刻度,有助于试样居中。 应用范围 载荷类型:拉伸、静态和拉-拉循环试验,不适用于高周动态疲劳试验 试样材料:塑料、金属、纺织品、纸张、薄片、箔、丝线等 试样形状:部件、棒材(线材)和平试样,带不带肩端均可 ...
Instron

夹紧力: 50 kN
... 织带绞盘抓手的设计是为了更快、更容易地测试安全带和其他高强度的带子和胶带。基于绞盘原理,这些夹具最大限度地减少了滑移和钳口断裂的影响,并允许预先确定试样的长度,同时允许快速、方便地加载。 操作原理 这些织带式绞盘夹持器采用了巧妙的双绞盘设计,可快速、轻松地加载,其抓取动作可在试样的整个长度范围内产生适当的断裂。易于装载的关键是使用内部和外部绞盘。试样只需将一端插入内部绞盘的凹槽中,然后将其旋转360度,就可以进行加载。由于利用了两个绞盘的表面,抓取效率也大大增加。 应用范围 载荷类型:静态拉伸 试样材料:织带、皮带、带子 试样形状:平面 ...
Instron

夹紧力: 1, 3, 10 kN
... Instron的机械楔形抓手可用于静态或动态材料测试,可互换的楔形抓手面可容纳平面或圆形试样。 该夹具的设计是为了在不给试样引入轴向预载的情况下牢牢地抓住试样。这是通过使用仅在水平方向上相对于试样移动的钳口面来实现的。 应用范围 载荷类型:静态或动态,反向应力。 试样材料:金属、塑料、复合材料。 试样的几何形状:圆形截面(非纽扣头)或带或不带肩部标签的扁平试样。 ...
Instron

运行行程: 6, 8, 10 mm
... 2指平行抓手 "集多功能于一体" 与类似的气动抓手具有近乎相同的抓取力 断电时采用机械方式自锁 与类似的气动抓手具有相同的连接孔图 即插即用 - 单芯电缆解决方案,通过 I/O 信号或 IO-Link 实现便捷调控 集成式ACM 调控模块- 抓取力、位移时间和 抓取点均可调节 防腐蚀和密封程度等级 IP64 无刷直流电机 - 高达三千万个周期内免维护 系列特徵 (最多)3 千万次循环免维护 模拟量传感器 IP64 耐腐蚀 机械式自锁 阻隔空气密封 夹持力可调 ...
ZIMMER GROUP

夹紧力: 100 N - 1,800 N
运行行程: 40, 60, 80 mm
... 2指长行程平行抓手 "高性能" 5 百万次循环免维护 IO-Link集成式传感器 带集成控制器的伺服电机 无刷驱动技术和位置,速度或功率调节确保最大的功能 带IO-Link 除了运用非屏蔽单电缆方案,这个适用到未来,即插即用并且为您提供了多种传输方式的产品极易于集成到您的控制系统内。 温柔而强大 功率版本-03用于通过机械自锁抓取重型工件,功率版本-31用于敏感部件的夹持 系列特徵 (最多)5 百万次循环免维护 IP54 机械式自锁 可定位 夹持力可调 高移动速度 平缓 强大 ...
ZIMMER GROUP

夹紧力: 200 N - 3,200 N
运行行程: 60 mm
... "强大的" • - 高抓取力 高抓取力确保您可以安全的抓取最重的工件 • - 伺服驱动 定位,速度和力的控制并结合自锁机制确保最高的功能性 • - 总线盒 怎样才能灵活化:PROFIBUS, SERCOS III, PROFINET IO, EtherNet/IP 或 EtherCat - 您来决定最适合您系统的方式 ...
ZIMMER GROUP

夹紧力: 12 N
... 产品详情
HONPINE机器人手L10是一款具有20个自由度的高性能灵巧手。配备自主研发的电机和连杆传动机制,确保牵引稳定性,同时实现精确控制和平滑运动。广泛用于教育与研究、钢琴演奏、家庭辅助和老年护理,推动智能机器人和人机协作的进步和实施。支持通过各种传感器的多模态环境感知,并兼容ROS/QT环境(具有标准的ROS插件用于二次开发)。
特点
- 高度仿生多自由度设计:20个自由度(10个主动+10个被动)能够精确模拟人手的动作和精细操作,支持自适应物体抓取和复杂任务。
- 多模态感知与智能交互:可配置摄像头、电子皮肤和其他传感器,构建全方位的“视觉+触觉”感知模型,增强非结构化场景的环境理解和交互能力。
- 边缘云集成与无代码部署:利用边缘云架构,从云库中一键部署技能,降低使用障碍,提高开发效率。
- 高可靠性结构与数据支持:自主研发的电机和连杆系统抗冲击和损坏,适应高强度场景,如具身智能训练。支持高效的数据收集,用于数据农场建设和算法优化。
机器人手接口
- 支持的机械臂:UR、Franka、XArm、RealMan、Songling
- 支持的数据采集方法:远程操作手套、外骨骼手套、液态金属手套、视觉、VR(Meta
Suzhou Honpine Precision Industry Co., Ltd.

夹紧力: 18, 20, 100 N
... 产品详情
HONPINE L20是一款21-DoF灵巧手,能够精确模拟自然人手的抓握,进行精细操作。它采用创新的连杆传动和自主研发的电机,实现高精度运动,并支持力、视觉和触觉传感器,通过多模态感知增强环境适应性和智能交互。凭借高自由度、多模态感知和力-位置混合算法,它广泛应用于教育与研究、工业自动化、家庭辅助和老年护理,提供精确、灵巧的操作解决方案。
特点
- 高度仿生的自由度与精细操作: 21个自由度(16个主动+
Suzhou Honpine Precision Industry Co., Ltd.

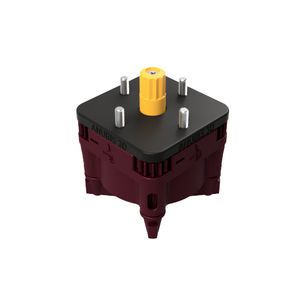
夹紧力: 10, 15 N
... 产品详情
HONPINE L30是一款21自由度的灵巧手,能够以毫米级的操作精度准确复制人手的精细动作。它采用先进的腱驱动和高度集成的机电系统,实现稳定的运动和精确的控制,并支持多模态感知(力、触觉、视觉),以增强实时感知和交互的可靠性。凭借高自由度、多模态感知和领先的运动控制算法,它广泛应用于工业自动化、医疗辅助和研究实验,提供高度适应性和可靠的末端执行器解决方案。
特点
- 高度仿生的精确操作: 21个自由度(17个主动+4个被动),独立控制拇指和四指,能够准确复制人手的精细动作,高重复定位精度和精细的抓力分辨率,适合精密任务。
- 快速响应的腱驱动:
Suzhou Honpine Precision Industry Co., Ltd.

运行行程: 85, 140 mm
... 安装有应急开关,提升紧急情况时的安全性 可自由控制速度,力矩,行程(30个点位) 自锁功能(断电时防止工件脱落,届时可手动拆除工件) 85,140大行程产品 更改夹爪(JAW)位置时通过GUI图形储存坐标值 主要关节部(摩擦部)经过特殊表面处理提升强度,腐蚀性 ...

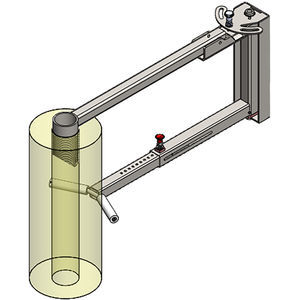
... 可直接替换 Haver & Boecker 公司“The Benjamin”原厂夹具 使用寿命更长,夹持力比原厂夹具更大 夹持力可调 密封式夹颚,确保长久耐用,适用于恶劣环境 专为在填充过程中夹持混凝土或灌浆袋而设计 每侧钳口可张开 90°,总张开角度达 180° ...

... 针对具体项目定制 强大抓持力设计 维护要求低 便于维护的设计 桁架机械手结构紧凑 抓取时运行可靠性高 抓取精度高 高耐用性 桁架机械手驱动方式客户可定制 ...

... 用于纸张印刷机的伸展臂。 蓝色和乘以形成由钢板由轴承相互连接的冲压部件。 由于采用了碳化钨涂层,夹具尖端防滑和耐磨。 带三个轴承点的轴接收器由钣金夹持器支架上的初始张力为 0.20 mm 保证。 加工轴承孔机。 -夹具尖端的平行度 < 0.20 毫米 -轴承孔的同心度 < 0.05 毫米 ...
... 从外部安全抓取线卷 外部线卷抓取机适用于钢材贸易,可连续抓取大量货物。精心的设计可确保安全、轻柔地抓取线卷。 信息 - 结构坚固,抗扭刚度高 - 可更换的抓取爪由高耐磨细纹钢制成 - 自动步进装置 - 大眼悬挂装置 ...
运行行程: 4, 9, 13 mm
... 平行机械手系列,2爪,单或双作用,双作用中的3爪,标准或滚珠导轨。紧凑型版本,带椭圆形活塞,行程调整。磁性检测为标准配置。 ...

... 该设备采用机械/气动膨胀原理,通过 120° 夹钳进行牵引,是在不同工业环境中搬运各种物体和部件的理想选择。其多功能性和适应性使其成为满足提升和搬运需求的可靠选择。 ...

... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 Wb - 60 Wn - 40 Wm - / Hb - 200 Gn - 0-133 Lb - 68.2 Lt - 62.7 Ln - 99 L - 75 Smax - 37 Ymax - 50 Gn+2Smax - 0-207 负载 ...
Soft Robot Tech Co.,Ltd
... 我们的起重工具系列是市场上最广泛的。 您可以找到完全符合您的需求和负载的解决方案。 我们的所有工具或解决方案都适用于各种工作和工业环境,从行政办公室到农业食品或化工厂。 我们能够为客户量身定制解决方案,以满足独特的搬运要求。 提升能力:50 - 80 千克 表面处理 : 钢和不锈钢 型号 : 5 特点 用于缠绕卷轴的铰接式夹芯装置 铰接式铁芯夹持器可搬运重达 50 公斤的货物,重 9 公斤。 该工具由不锈钢制成。 它可以搬运长度从 400 毫米到 1200 毫米、外径从 200 毫米到 ...

夹紧力: 140 N - 400 N
运行行程: 80 mm
... PGHL系列是大寰自主研发生产的工业扁电爪, 以其精巧的结构设计, 大负载和高力控精度, 可适用更多大负载夹取需求,适用更多应用场景。 尺寸小 重量轻 Z和Y方向尺寸紧凑,本体重量轻,降低载体的负载和惯性力矩,实现设备轻量化,提高运行速度 大夹持力 大行程 大负载 单侧夹持力可达,可承受负载8kg,大行程可夹持多种尺寸,参数柔性适合产线换型 机械自锁 安全可靠 掉电自锁夹持力保持大于95%,避免异常掉电工件掉落 工况模拟测试 实现在机械臂上大负载翻转和搬运及在模组上快速搬运(速度 1m/s);异常断电下机械架构自锁 任务难点: ...

... 我们为您的起重机提供所需的一切。 作为一个全方位的供应商,我们生产和销售与起重机有关的一切。我们为您提供圆形吊索和起重皮带,以及链条悬挂和悬挂齿轮。我们生产所有类型的抓斗、起重梁和负载笼。 ...

... 它可以安装在直进式连接模块[CM]系列或侧进式法兰连接模块[FCM]系列中。 你可以选择直式或侧式 正压下指尖打开,负压下指尖夹紧。建议与Rochu控制器一起使用。 指尖距离G可以通过工作中的正压来调整。 喙B-20802[P]可以单独更换 ...
Suzhou Rochu Robotics Co.,Ltd

... 基于成熟技术的创新概念 - 通过完整的内部规划和生产,我们保证我们的客户从单一来源获得最高质量标准。无论是单个部件的制造(连接),整个组件的生产,还是客户特定抓取技术的构思和生产--WMS是您的合作伙伴 这样,您就可以专注于您的核心业务。有了WMS作为您的外部服务提供商和装配体供应商,您就可以减轻您的内部设计和制造的负担了得益于多年来在特种机械制造方面的经验,我们了解客户的复杂挑战。我们的工艺专家为每一个应用开发个性化的解决方案概念,无论是特殊的抓手还是特殊的组件,我们几乎是您每一个需求的联系人。 为您的工厂,为您的过程。无论是对现有机器的改造,还是作为新工厂的创新补充。有了WMS机械手,您就有可能对生产设施中的变化或新部件做出快速反应,并且--无需对机器人单元进行昂贵的改造--就能抓取工件。 我们的服务。 ...
运行行程: 20 mm - 42 mm
... Anubis 3D第二代外部机械夹钳在已经很好的产品基础上进行了改进,以满足您所有的瓶、罐和容器的取放需求。其设计是使用4至8个齿轮驱动的夹子组合,独特地锁定在瓶、罐或容器的颈部,以确保产品的快速运输。 我们的系统被设计成由一个简单而精确的气动齿轮和齿条驱动,可以适应几乎任何产品阵列。 通过改造您过时的漏气真空和气动式抓取器,消除昂贵的生产线停工时间。Anubis 3D机械抓取器的设计具有重量轻、能源效率高、成本效益高和可靠等特点。 Anubis三维机械抓取工具(EOAT)是根据您的要求设计的,无论是改造还是新的抓取应用。我们的抓瓶器EOAT可以被配置成任何模式。每一行都是由高质量的线性气缸通过齿轮和齿条系统驱动的。 - ...
Anubis 3D Industrial Solutions Inc.


... TMS容器夹持夹具适用于在消费者包装容器或其他收集容器中分析半固体或浓稠液体样品的测试。 四个软握橡胶臂可牢固地固定直径从10mm到70mm的容器。这对于测试粘性液体的回程(拉伸)周期内的粘性测试至关重要,因为在测试过程中,需要防止提升。 将样品放置在提供的容器内,在对浓稠液体进行挤压或渗透测试时特别有用--夹头消除了将产品转移到不同容器中时因扰动产品而产生的变化。它还可以通过省去额外的步骤,加快测试过程。 应用 对原容器中的粘性浆料和液体进行挤压和渗透试验。 对半固体或粘性产品的附着力(粘性)测试:酸奶 ...

运行行程: 600 mm
... 当不需要从难以触及的区域回收磁性小部件时,可使用爪式抓取器。除了磁性提升器之外,爪式抓取器还有一根灵活、排列整齐的钢轴和一个坚固平滑的爪式机构,爪子经过硬化处理,可以经受长期的专业要求和微调。它有不同的尺寸,既可以单独使用,也可以成套使用。 镀镍,长型 600 毫米 长度 600 毫米 重量 75 克 ...