
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

夹紧力: 95, 170, 270 N
运行行程: 6 mm - 40 mm
... 双指平行抓取器 成本效益高 重量轻 行程可达80毫米 力达270 N 等级IP20 ...
OMIL

夹紧力: 123 N - 3,200 N
运行行程: 4 mm - 32 mm
... 廉价 可调节的行程 等级IP40 维护抓取力的装置 加压 高达130°C的版本 ...
OMIL

夹紧力: 48 N - 1,040 N
... 双指径向抓取器 相位输出 钳口角度为90°。 可调节角度 抓取扭矩最高可达110牛 抓取力从100克起 防护等级IP20 ...
OMIL

夹紧力: 4.6 N - 4.6 N
运行行程: 30 mm - 36 mm
... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 Wb - 60 Wn - 30 Wm - / Hb - 200 Gn - 3-142 Lb - 68.2 Lt - 62.7 Ln - 73 L - 54 Gn+2Smax - 3-202 负载 g - 600 产品重量 g - ...
Soft Robot Tech Co.,Ltd

夹紧力: 8.5 N
运行行程: 25 mm - 36 mm
... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 Wb - 60 Wn - 40 Wm - / Hb - 200 Gn - 0-133 Lb - 68.2 Lt - 62.7 Ln - 86.5 L - 62.5 Gn+2Smax - 0-183 负载 g - 1160 产品重量 ...
Soft Robot Tech Co.,Ltd

夹紧力: 4 N
运行行程: 5 mm - 6 mm
... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 Wb - 128 Wn - 20 Wm - / Hb - 200 Gn - 16-145 Lb - 68.2 Lt - 62.7 Ln - 34.2 L - 19.2 Gn+2Smax - 16-155 负载 g - 1160 产品重量 ...
Soft Robot Tech Co.,Ltd

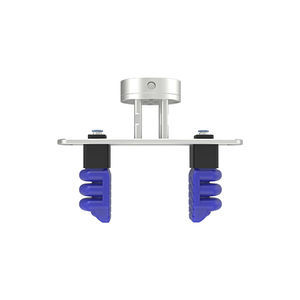
夹紧力: 7 N - 7 N
运行行程: 15 mm - 19 mm
... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 φb - 200 Wn - 30 Dn - 31-142 Lb - 68.2 Lt - 62.7 Ln - 53.5 L - 34 Dn+2Smax - 31-172 负载g - 2000 产品重量g - 521 最大工作压力 ...
Soft Robot Tech Co.,Ltd

... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 Wb - 185 Wn - 40 Wm - 62 Hb - 200 Gn - 6-133 Lb - 68.2 Lt - 62.7 Ln - 99 L - 75 Smax - 37 Ymax - 50 Gn+2Smax - 6-207 负载 ...
Soft Robot Tech Co.,Ltd

... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 φb - 200 Wn - 60 Dn - 102-125 Lb - 68.2 Lt - 62.7 Ln - 77.7 L - 47 Smax - 18 Ymax - 24 Dn+2Smax - 102-161 负载g - 9600 产品重量g ...
Soft Robot Tech Co.,Ltd

... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 φb - 200 Wn - 50 Dn - 84-134 Lb - 68.2 Lt - 62.7 Ln - 81.5 L - 56 Smax - 20 Ymax - 31 Dn+2Smax - 84-174 负载g - 7800 产品重量g ...
Soft Robot Tech Co.,Ltd
... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 Wb - 60 Wn - 50 Wm - / Hb - 200 Gn - 3-134 Lb - 68.2 Lt - 62.7 Ln - 81.5 L - 56 Smax - 20 Ymax - 31 Gn+2Smax - 3-174 负载 ...
Soft Robot Tech Co.,Ltd

... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 Wb - 60 Wn - 60 Wm - / Hb - 200 Gn - 0-125 Lb - 68.2 Lt - 62.7 Ln - 77.7 L - 47 Smax - 18 Ymax - 24 Gn+2Smax - 0-161 负载 ...
Soft Robot Tech Co.,Ltd

... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 Wb - 128 Wn - 60 Wm - 67 Hb - 200 Gn - 0-125 Lb - 68.2 Lt - 62.7 Ln - 94.7 L - 64 Smax - 31 Ymax - 40 Gn+2Smax - 0-187 负载 ...
Soft Robot Tech Co.,Ltd