
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
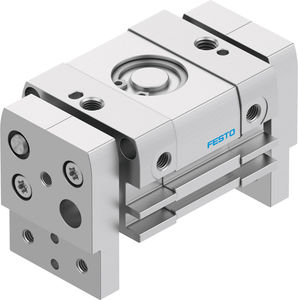
夹紧力: 27 N - 508 N
运行行程: 20 mm - 200 mm
... 当需要抓取和提升较大物体时,需要更大的开口和夹紧距离。新型长行程气爪 DHPL 精度高且重量轻,可在内部和外部抓取较大物体,是堆放箱子、抓取板和模塑零件或打开袋子的理想之选。 抓手夹爪有导轨,抗扭转性高 结构紧凑而坚固 适用于抓取较大零件 双作用活塞式执行机构 适用于外部和内部抓取 安装:通过螺纹直接紧固,带通孔 用于利用 T 型槽和圆形槽的接近式传感器进行位置感测 通过减少材料的使用实现可持续生产 ...
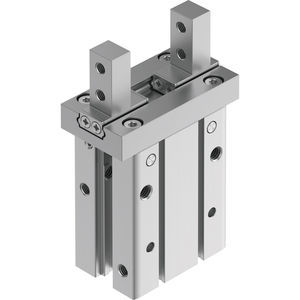
夹紧力: 10.4 N - 777.2 N
运行行程: 2 mm - 15 mm
... 这款市场上最紧凑的平行气爪具有令人印象深刻的抓取力和抓取精度,有多种派生型可选,可满足各种要求和应用。 高精度高韧性滚珠导轨 占地空间小,而抓取力大 重复精度高 可用作双作用或单作用气爪 单作用型或带抓取力保持功能,常开 (NO) 或常闭 (NC) 适用于外部和内部抓取 多种固定和安装方式 通过减少材料的使用实现可持续生产 ...

... 6300 系列气动机械手通常用于装配机、机器人、机械手等复杂系统中。 该系列可满足该领域的各种要求,实现多种应用。 ...

... 6300系列气动夹爪通常应用于装配机、机器人、机械手等复杂系统中。 该系列产品能够满足该领域广泛的需求,适用于多种应用场景。 ...
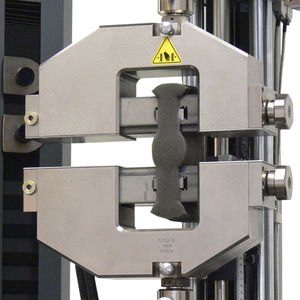
夹紧力: 0 N - 10,000 N
... 液压夹具主要用于50 kN及以上的试验载荷,需要与高夹紧力结合使用。 单作动缸液压夹具可以用于对称和非对称试样夹持(例如,剪切试验)。螺纹单元设置所夹持试样厚度而需要的开启宽度。 单作动缸液压夹具的串联式气缸同样可以均匀施加试验力到试样上(特别适用于纤维织物、纺织品和土工织物的测试)。 双作动缸液压夹具总是对称闭合,其中心与拉伸轴线重合,这就意味着试样在轴线位置精确地夹持,因此并不需要进行厚度调节。 液压夹具配备一套偏心活塞,同时为长行程活塞,能够深入试样表面位置和大的开口尺寸。 夹面的对中、试样夹具和活塞也可以夹持短试样。 确定的试验力施加保证了对于敏感性材料最好的夹持效果。 可以精确地再现接触压力 试样夹具可以以不同的额角度 ...
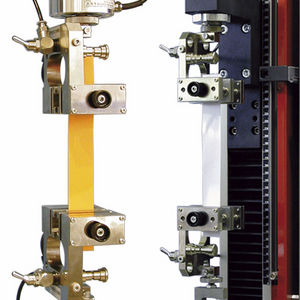
夹紧力: 0 kN - 1 kN
... 当需要测试不同材料时,特别那些对夹持力敏感的材料,必须夹持但材料不能有任何变化,气动夹具是特别有效的。 气动作动缸产生的夹持力直接作用于夹面上或者通过杠杆系统作用在试样上。 拉伸力和夹持力的分离保证在整个实验过程的恒定夹持力。对于易收缩的试样,由恒定气压恒定地维持夹持力。 与试样接触力是可再现的。 通过调节气压,可以安全地夹持敏感试样,避免夹面损坏。 最初的应力是拉伸载荷,可以是静态和脉动载荷。依照夹具的型号,可执行压缩和交变加载试验。 按照设计原理,夹持区域为无障碍。 大型夹具可以保留了小力值力传感器、试样夹具、试验工装和试验装置的安装位置,不需要拆卸试样夹具 ...

... - 双作用,可选弹簧(关闭或打开时)。 - 长行程或短行程。 - 可在前端用螺钉固定。 - 高效传动系统。 - 磁性传感器或可选感应式传感器。 - FDA-H1 食品级润滑脂。 ...
GIMATIC/意大利GIMATIC

夹紧力: 36 N - 2,400 N
运行行程: 1.2 mm - 20.5 mm
... 双动作。 结实的结构使得重型应用免维护,寿命长,可靠性强。 多种行程长度和夹紧力选择。 夹紧力沿着总行程方向作用。 平面区域。 过孔简单安装在凸缘上。 行程调整。 可选的磁传感器。 FDA-H1 食品级润滑脂。 ...
GIMATIC/意大利GIMATIC

夹紧力: 18 N - 700 N
运行行程: 2.3 mm - 15 mm
... 双动式驱动器。 反冲调整系统。 免维护,寿命长,可靠性高。 多种紧固选项。 可选磁性传感器。 还可提供弹簧关闭 (-NC) 或弹簧打开 (-NO) 选项。 FDA-H1 食品级润滑脂。 ...
GIMATIC/意大利GIMATIC

夹紧力: 450, 500 N
运行行程: 8 mm
... 昊志机电气动手指,精度达到国际水平,超乎想象的精度,重复定位精度≤0.01mm,零件表面经过特殊硬化处理,经100万次试验测试,精度无损失。 重量经过轻量化设计,优化结构,气动手指重量比国际同类产品轻12.6%。 ...
Guangzhou Haozhi Industrial Co., Ltd

... 昊志机电气动手指,精度达到国际水平,超乎想象的精度,重复定位精度≤0.01mm,零件表面经过特殊硬化处理,经100万次试验测试,精度无损失。 重量经过轻量化设计,优化结构,气动手指重量比国际同类产品轻12.6%。 ...
Guangzhou Haozhi Industrial Co., Ltd

... 昊志机电气动手指,精度达到国际水平,超乎想象的精度,重复定位精度≤0.01mm,零件表面经过特殊硬化处理,经100万次试验测试,精度无损失。 重量经过轻量化设计,优化结构,气动手指重量比国际同类产品轻12.6%。 ...
Guangzhou Haozhi Industrial Co., Ltd

夹紧力: 70, 170 N
运行行程: 5 mm
... - 双作用平行夹钳,用于内部和外部夹持。 - 阳极氧化铝合金主体和回火钢爪。 - 底部或侧面固定。 - 所有尺寸均配有磁铁和传感器槽 每包数量: 0 最小订货量: 00 计量单位:件 执行器: 最大输入压力 (巴):008 最高温度 (°C):70 最小输入压力(巴): 0202 最低温度(°C): 0505 ...
METAL WORK/麦特沃克

夹紧力: 70, 170 N
运行行程: 5 mm
... 双作用夹钳,带平行钳口和内外夹持。 机身由阳极氧化铝合金制成,卡爪由硬化钢制成。所有尺寸都配有磁铁和传感器槽。下夹板带有 V 型锁扣和凹槽。 带 V 形锁联轴器的板也可安装在机械手的两侧。 每包数量: 0 最小订货量: 00 计量单位:件 执行器: 处理孔径 (mm):20 最大输入压力(巴):008 最小输入压力(巴): 0202 ...
METAL WORK/麦特沃克

夹紧力: 135, 100, 45 N
运行行程: 5, 4, 7 mm
... 双作用系统,可在两个方向夹紧。所有的机械手都带有磁铁和传感器槽。 每包数量:0 最小订货量。0 计量单位:件 执行器。 处理孔径(毫米)。16 最高温度(℃): 80 最低温度 (°C): -10 产品系列:气动抓取器 尺寸:16 ...
METAL WORK/麦特沃克

夹紧力: 25 N
运行行程: 25, 12.5 mm
... 电动机械手(EH) EH系列 电动抓取器 特点 - 精确 - 结构紧凑,重量轻 - 抓取 - 摆放 - 距离测量 产品代码。信息 : EH4-AZAKH 反冲力: : 0.1 mm 行程: : 25/12.5 mm 最大加速度: : 20/10 m/s² 最大速度::156/78毫米/秒 最大推力: : 25 N 框架尺寸: : 46x48.5 mm 重复定位精度: : ±0.02 mm 最小移动量: : 0.02/0.01 mm ...

夹紧力: 14 N - 396 N
运行行程: 20 mm - 200 mm
... ・重量轻 重量最多削减10%:585g →525g。 主体及内部的构造变更使质量减小。 ・内置防尘构造(标准配置)。 应对粉尘环境(订制规格:-X85, -X86□)。 ・长行程 1只气爪可对应多种工件尺寸。 ・采用双活塞构造,外形紧凑夹持力大。 ・可直接安装小型磁性开关。 ...
SMC PNEUMATIC

夹紧力: 19 N - 158 N
运行行程: 8 mm - 80 mm
... 低矮的设计节省了空间,减少了弯曲力矩,并通过平稳的操作提高了精度。每种孔径都有三种标准冲程长度(短、中、长)可供选择。 -可调节冲程选项 -自动开关功能 -可选 NSF-H1 食品级润滑油 ...

... 描述 基爪在滚子轴承导轨上平稳运行的二指平动机械手 应用领域 在低污染环境中抓取和移动中小型工件,例如装配、测试、实验室和制药行业 优点 - 为您带来的益处 交叉滚子导轨 用于通过无间隙基爪导轨实现精确抓取 椭圆形活塞传动原理 用于最大抓取力 基爪以双滚柱轴承为导向 确保低摩擦且平稳运行 优化的基本荷载额定值 适合使用长手指的机械手 通过电磁传感器进行监控 最大化工艺可靠性 沿着四个螺钉方向从两侧安装 用于通用和灵活的机械手装配 通过无软管直接接口或螺旋接口供应气源 所有自动化系统均可用的灵活压力供应 紧凑尺寸 用于搬运中的最小干扰轮廓 ...
SCHUNK SE & Co. KG

... 广泛的灵活性 增加 FlexGripper-Claw 后,IRB 660 和结构紧凑的 IRB 460 码垛机器人在袋子码垛应用中更加有效。FlexGripper-Claw 最适合在涉及化学品和盐的最恶劣条件下使用,可处理重达 50 公斤的包装袋,以及从大米到碎石、从塑料到水泥等不同形状和内容物的包装袋。 易于集成,使用方便 FlexGrippers 易于安装和编程。机器人人机界面 FlexPendant 预先配置了 FlexGripper 输入/输出信号,大大减少了设置和编程时间。图形用户界面简化了码垛程序的测试。例如,只需点击一下鼠标,即可进行 ...

夹紧力: 94, 62, 76, 107 N
运行行程: 6 mm
... CSSP 系列气动机械手为用于机床操作、生产线末端包装和装配等工业流程应用的协作机器人提供了创新解决方案。其轻巧紧凑的设计优化了可用空间和协作机器人的有效载荷,确保了灵活性、安全性、易用性和效率。 结构类型 - 带有 T 型导轨的自定心协作机械手 操作 - 双作用,关闭或打开时均带弹簧 尺寸 - 40 毫米 气路连接 - M5(管 Ø6 mm) 工作温度 - 5°C ÷ 50°C 储存温度 - 10°C ÷ 60°C 最大使用频率 - 3Hz (NC) 1.7Hz (NO) 重复性 - 0.02 ...
CAMOZZI AUTOMATION/康茂胜
夹紧力: 7,500 N
运行行程: 5.2, 6.3 mm
... 概述
110 mm 2爪工件夹具,带内置气缸。高精度和大夹持力可实现稳定的加工和切削作业。
主要特性
- 爪行程(直径)(mm):5.2
- 夹持直径(mm):最小 9 — 最大 110
- 夹持力(kN):7.5(在气压 0.6 MPa 时)
- 重量(kg):6.9(含 Soft Top Jaws)
- 最大气压(MPa):0.6
- 匹配软爪:SB04A1T(Standard
Kitagawa Europe

夹紧力: 40, 22, 6, 5 N
运行行程: 23.5, 14.3, 7.6, 3.2 mm
... 为您介绍由雅马哈发动机出品的, 实现了高度精准控制抓持的电动夹爪S机型(单凸轮型)。 S机型(单凸轮型) 采用独特的凸轮结构, 简单且小巧。 自锁功能无效, 可使用外力驱动夹具。 抓持力控制:30~100%(单位1%) 速度控制:20~100%(单位1%) 加速度控制:1~100%(单位1%) 多点位置控制:最大10,000点 工件尺寸判断:0.01mm单位(根据ZON信号) ...
Yamaha Motor Co.,Ltd.

运行行程: 10 mm - 25 mm
... 集成在机身内的指锁式流量调节器 夹爪的所有面均可安装磁传感器 可安装在4种不同位置 Airwork PA系列角开式气动夹爪是简单搬运应用的理想解决方案,尤其适用于需要节省空间的场合。 得益于可采用多种安装位置,它们能够满足最广泛的应用需求。 此外,可在夹爪的各个侧面安装圆形磁传感器。 ...
A&T Fluid solutions

运行行程: 10, 25, 16, 20 mm
... 机身上设有定位孔,确保完美安装 出色的夹持力 可搭配4mm圆形传感器使用,适用于所有Airwork卡钳 开口角度为180°的角形夹具是解决空间受限问题的理想方案,同时满足对完全可缩回钳口的需要,从而避免与机器其他部件发生碰撞。 该系列夹爪允许在两个主表面上安装磁性圆形开关。 ...
A&T Fluid solutions

夹紧力: 33 N - 45 N
运行行程: 20 mm - 160 mm
... PTFE 杆导套,可提高长期耐用性 与最知名品牌互换性良好 PH 系列夹爪用于搬运大型工件,由于每种直径均可选择三种不同的行程,因此可覆盖众多应用领域。 夹爪的开合运动始终通过内部小齿轮和齿条系统保持同步,从而实现工件的居中定位。 中心体上设有用于安装可伸缩传感器的凹槽。 ...
A&T Fluid solutions

... 手动平推夹具应用广泛,可简单有效地夹持试样。通过双面平推设计,可以调整夹具开口以适应不同的试样厚度,确保试样受力和夹具体在同一轴线上。夹具可以配备各种尺寸的可替换夹面,并可以选择金属光面、橡胶涂层和锯齿等各种表面形式。 工作原理 2710-100系列双面平推设计可适用于最大46 mm(1.8 in)厚的试样,对不规则或非对称试样(例如搭接剪切和元件测试)进行补偿。夹具两侧的旋钮上都有滚花,便于手动拧紧,更高载荷的夹具还具有内六角螺钉旋钮,可使用六角扳手或扭矩扳手拧紧试样。夹具上带有刻度,有助于试样居中。 应用范围 载荷类型:拉伸、静态和拉-拉循环试验,不适用于高周动态疲劳试验 试样材料:塑料、金属、纺织品、纸张、薄片、箔、丝线等 试样形状:部件、棒材(线材)和平试样,带不带肩端均可 ...

... 高级液压楔形动作夹具 用于对金属材料和复合材料进行静态和动态测试 高级液压楔形动作夹具是一种多功能夹具,可用于静态和动态材料测试应用,能为动态测试和静态测试分别提供高达 500 kN 和 600 kN 的力容量。可互换夹钳面非常适用于金属材料和复合材料测试,可以容纳扁平形和圆形的试样,而且无论施加何种测试力,该夹具的设计都能对试样施加恒定的夹持力。只要有足够的液压供应处于活动状态并连通,夹具便可以持续地施加这种受控制的夹持力。 工作原理 每个夹具独立工作,而外部液压供应则为打开和关闭夹具提供压力。施加夹持力后,试样/夹钳面的相对垂直位置保持不变,可防止夹持过程中产生试样载荷。夹具面接触试样后,液压会对夹具顶部产生垂直力。夹具经设计为自动补偿试样厚度变化,因而夹持力会保持恒定。 应用范围 载荷类型:静态或动态、逆向应力。 试样材料:金属、复合材料、塑料 试样几何形状:使用相应可选夹钳面的圆形和扁平形截面 ...

夹紧力: 25, 100 kN
... 疲劳等级的液压楔形握把 用于8874系统的±25kN / ±100Nm 疲劳额定液压楔形手柄 侧入式设计,便于从侧面插入试样。 平面上可调节的试样挡板提供了准确的试样中心定位 适用于拉伸和压缩(包括完整的反向应力动态测试),并具有抗扭能力 温度范围。+4C至+65C 直接安装在8874推杆和称重传感器上,无需额外的疲劳等级适配器 机械接口。6 x M8 on 75 PCD 尺寸。260mm高 x 130mm直径 握把质量:每个握把约16.8公斤(37磅)。 8874机器需要8000-049附件套件,如果在执行器上安装称重传感器的话。 需要。爪面(根据需要从2703-801到804中选择)和207巴(3000psi)握把控制器 数量:2个抓取器 ...

夹紧力: 208 N - 505 N
运行行程: 2, 4 mm
... - 规格从 50 到 380,每种规格都有两个冲程。可选配抓取力安全装置和/或防尘盖。 - 通过中心套(包括在供货范围内)固定叼牙爪。 物理特性 - 中心夹持结构紧凑,由高强度硬涂层铝合金制成 - 所有功能部件均由硬化钢制成,使用寿命最长 - 楔钩原理,气动驱动(可根据要求提供液压驱动) - 通过感应式或磁性位置传感器进行位置监控 - 可选配 FKM 密封件,用于高达 150°C 的高温环境(根据要求提供) - 内置清洗空气接口,防止污染 应用领域 通用抓取圆形和角形工件,配有两个平行的抓取指,可使用机器人或传送门进行搬运。 优点 - ...
RÖHM GmbH

夹紧力: 316 N - 932 N
运行行程: 3, 6 mm
... - 规格从 50 到 380,每种规格都有两个冲程。可选配抓取力安全装置和/或防尘盖。 - 通过中心套(包括在供货范围内)固定叼牙爪。 物理特性 - 中心夹持结构紧凑,由高强度硬涂层铝合金制成 - 所有功能部件均由硬化钢制成,使用寿命最长 - 楔钩原理,气动驱动(可根据要求提供液压驱动) - 通过感应式或磁性位置传感器进行位置监控 - 可选配 FKM 密封件,用于高达 150°C 的高温环境(根据要求提供) - 内置清洗空气接口,防止污染 应用领域 通用抓取圆形和角形工件,配有两个平行的抓取指,可使用机器人或传送门进行搬运。 优点 - ...
RÖHM GmbH

夹紧力: 470 N - 1,236 N
运行行程: 4, 8 mm
... - 规格从 50 到 380,每种规格都有两个冲程。可选配抓取力安全装置和/或防尘盖。 - 通过中心套(包括在供货范围内)固定叼牙爪。 物理特性 - 中心夹持结构紧凑,由高强度硬涂层铝合金制成 - 所有功能部件均由硬化钢制成,使用寿命最长 - 楔钩原理,气动驱动(可根据要求提供液压驱动) - 通过感应式或磁性位置传感器进行位置监控 - 可选配 FKM 密封件,用于高达 150°C 的高温环境(根据要求提供) - 内置清洗空气接口,防止污染 应用领域 通用抓取圆形和角形工件,配有两个平行的抓取指,可使用机器人或传送门进行搬运。 优点 - ...
RÖHM GmbH

夹紧力: 60, 115, 200, 340 N
运行行程: 4.5, 6, 8, 10 mm
... 搬运气动夹具,采用两个同心指平行夹紧。 导轨为棱柱形,机构受到完全保护。 选项 : 磁性检测(T 形槽) 双指平行紧固的优点 这种平行夹具的夹持方式是最通用的夹持方式:它可以用相同的夹爪夹持尺寸略有不同的工件,可以在开口处的有限空间内抓取工件,可以从内侧或外侧抓取工件...... 对于不同尺寸的工件,可以使用 25 型平行长行程夹钳在不更换夹爪的情况下夹持。 24 型平行夹爪的可靠性和坚固性 硬质阳极氧化机身和气缸、棱柱钢导轨、全保护机构,这些气动平行机械手坚固可靠。 由于气缸上表面有 2 ...
AVM AUTOMATION

夹紧力: 60, 170, 435, 990 N
运行行程: 12 mm - 120 mm
... 气动平行夹钳,带 2 个同心手指和较长的张开行程。 超长棱柱导轨,可抵抗扭转扭矩。 超长的长度/行程比 选项 : 极端位置上的感应式传感器 长行程平行机械手的优势 这种气动平行机械手具有较长的张开行程,可以抓取不同尺寸的工件(例如:各种轴承、各种轮子......)。 滑块的长度使其能够支撑相当长的夹爪,而不会有对接的风险。 卓越的长度/行程比和坚固性 在整个行程中,夹紧力和导向质量都是恒定的。由于滑块平行安装,因此这些夹钳具有非常好的行程/长度比。 采用硬质阳极氧化处理的机身和长棱柱钢导轨,这些平行气动机械手性能可靠、坚固耐用。 安装接口可将它们集成到气动处理组件中。 ...
AVM AUTOMATION

夹紧力: 150 N - 920 N
... 带 2 个同心指的气动抓手 手指自锁闭合夹具(拨动关节动作) 开口处的弹性吸收 选项 : 感应式传感器 开口螺钉限制 带光滑孔的指针 180° 夹角机械手的优点 具有 180° 张开角的机械手通常用于抑制间隙运动,因为张开的手指允许产品横向通过,例如在线性传送过程中或用于将产品保持在转台上。 通过拨动效果在关闭时自锁 这些机械手采用拨动技术,可在最后一次闭合时自锁夹爪,并具有较大的夹持力。因此,即使在没有气压的情况下也能保持锁定。它们只能用于从工件外部抓取和抓取尺寸相同的工件。 安装在旋转轴上的检测凸轮允许 ...
AVM AUTOMATION

... 有了这个小的辅助工具,你可以轻松地把土工膜拉到它的位置。再也不用用手去滑了。这个工具在土工膜上的爪子非常有力。 使用方便 通过弹簧自动夹住材料 ...

夹紧力: 4 kgf - 60 kgf
... PA 系列角爪卡箍用于机器人和塑料工业,更广泛地应用于各类机械手。特别推荐在注塑机卸载机器人上使用。 选择理论夹紧力至少为所需有效夹紧力两倍的夹钳。上表中的夹紧力为理论夹紧力,压力为 6 巴。抓取力与抓取点和支点之间的距离成反比。 例如,PA 20 卡箍的夹持点距支点 25 毫米,则夹持力为 F = 10.1(下表)x 15/25 = 6.06 公斤。 被搬运物体的重量与夹钳的重量相加,不得超过夹持点所受力的 1/20。手指的开合速度可通过压缩空气调节器进行调节。 .DE:使用压缩空气的双作用夹钳。 .SEF:通过压缩空气闭合,通过回位弹簧打开(简单闭合效果)。 .SE0:通过压缩空气打开,通过回位弹簧关闭(简单的打开效果)。 规格 压缩空气:过滤、润滑或无润滑 最大压力:10 ...

夹紧力: 140 N - 26,050 N
运行行程: 2 mm - 45 mm
... • - 线型钢制导轨 — 性能优异的导轨设计 钢 / 钢导轨能够持久保持高精度,坚固耐用,且使用寿命长,维护间隔高达 3 千万次抓取循环。欢迎选购此款商品并从中获益,同时提高您机器的经济性及过程安全性。 • - 密封、防腐蚀 — 通用型抓手 几乎可用于所有环境条件,借助一个高达 IP67 密封等级的结构和标准化的防腐蚀工艺,您可将此机械夹爪应用于各类应用环境库存和生产成本。借此,您可避免在生产中频繁更换不同型号的机械夹爪,从而降低库存和生产成本。 • - 线型铝制导轨 — 替代方案 总的来说,与带 ...
ZIMMER GROUP

夹紧力: 6 N - 400 N
运行行程: 1 mm - 12 mm
... "强有力的" • - 力量可高出一般标准40% 最优的力和重量的平衡设计的结果是可以使用更小尺寸的部件来完成任务,从而减少了您的成本 • - 抓手手指可比一般标准最大长出50% 高保持力和高扭矩确保您使用的灵活性和应用的最大动态化 • - 无间断的持续工作 “德国制造”象征着我们决不妥协的质量要求,保证免维护运行一千万次循环 ...
ZIMMER GROUP

夹紧力: 8.4 N - 5,250 N
运行行程: 3 mm - 13 mm
... "持久的" • - 经证实的技术 经过20年,产品通过应用证实了我们的可靠性,这 就意 味着我们的产品不会因质量而影响您的生产进程。 • - 非常短的循环周期 低摩擦的导杆确保非常长的使用周期,同时为机器提供最大的输出 • - 无间断的持续工作 “德国制造”象征着我们决不妥协的质量要求,保证免维护运行一千万次循环 ...
ZIMMER GROUP

夹紧力: 410 N
运行行程: 8 mm
... 迎接挑战 我们的平行、中心和角型夹爪专为安全精准地抓取从几百克到 60 公斤的重载工件而设计。它们适用于各种零件搬运和组装操作。. 强力抓手,安全精准操作 > 从一系列的颚式行程和承载能力中选择 楔形夹持结构,用于承受大夹持力 精确重新定位 全硬化结构,超长寿命 易于安装磁性开关 ...
Infranor Group

夹紧力: 650 N
运行行程: 10 mm
... 迎接挑战 我们的平行、中心和角型夹爪专为安全精准地抓取从几百克到 60 公斤的重载工件而设计。它们适用于各种零件搬运和组装操作。. 强力抓手,安全精准操作 > 从一系列的颚式行程和承载能力中选择 楔形夹持结构,用于承受大夹持力 精确重新定位 全硬化结构,超长寿命 易于安装磁性开关 ...
Infranor Group

夹紧力: 1,050 N
运行行程: 13 mm
... 迎接挑战 我们的平行、中心和角型夹爪专为安全精准地抓取从几百克到 60 公斤的重载工件而设计。它们适用于各种零件搬运和组装操作。. 强力抓手,安全精准操作 > 从一系列的颚式行程和承载能力中选择 楔形夹持结构,用于承受大夹持力 精确重新定位 全硬化结构,超长寿命 易于安装磁性开关 ...
Infranor Group

夹紧力: 3 N - 300 N
运行行程: 0 mm - 75 mm
... 机器人电动抓手是一种由伺服电机驱动的智能末端效应器,专为工业自动化场景设计,可在机器人末端实现精确的材料抓取、搬运和装配。其核心由电机、减速机构、传感器和控制系统组成,支持毫米级到微米级精度的自适应抓取,适用于电子元件、医疗器械、精密零件等微小工件的柔性生产。高精度控制能力集成驱动与控制:大多数产品采用 "驱动控制一体化 "设计,最大程度地减少了通信和执行延迟:精确的力控制:支持 0.1 N 级的力微调,避免损坏精密工件(如电子元件、医疗设备):多模式操作:集成智能功能协作机器人的标准接口:与主流协作机械臂的大多数末端执行器接口兼容:断电自锁:在突然断电的情况下,自动保持抓取并锁定位置,防止部件掉落和潜在事故:配备自主研发的高精度、低延迟位置传感器,可提高物体检测和跌落监测的分辨率和实时响应能力:高精度力控制:采用先进的电机控制算法,包括 ...

... 产品简介电动旋转机械手是一种集抓取和旋转功能于一体的机电一体化末端执行器。它通过内置伺服电机驱动齿轮或同步带机构,在抓取工件(如拧瓶盖和装配齿轮)的过程中实现同步旋转。其核心部分由电机、减速器、抓取机构和控制器组成。它支持 360° 无死角旋转和旋转角度的精确控制,适用于自动化装配线和实验室仪器操作等场景:可重复定位精度达 ±0.02 mm,旋转角度精度达 ±0.02°,满足精密装配的要求:机电一体化集成驱动和控制:结合了伺服电机和控制器,简化了气动电路设计,实现了即插即用操作:适应性和智能性可调节的抓取力和速度:单指抓取力可在 ...

... 作用类型 - - 双作用/单作用:常开常闭 工作介质 - - 清洁空气(40pm 过滤) - - 工作压力 - - 0.7Mpa (101.5psi/7 bar) 工作压力 - 0.7Mpa (101.5psi/7 bar) - 工作温度 - PC) - 20~80 (无冻结) 工作温度 - PC) -20~80(不结冰) ...

... 高精度(重复性:±0.01mm)。可用于内/外侧抓取的平行抓手。可选择单动/双动和传感器选项。 一体化的各种抓取方式。 各种抓取动作:内抓、外抓、靠空气或靠弹簧力。 独特设计的辊子导向系统。 辊子之间的距离较长,能够实现平稳的移动和抓取。 也可提供抗侧向力矩载荷的E型(带E型挡圈)。 具有4毫米行程的超薄机身。 10毫米宽的机身,结合了8毫米孔径的气缸,可以实现高抓取力。 是窄间距和多工位使用的理想选择。 6毫米行程的短机身。 宽冲程类型可使设备变得紧凑。 超轻的重量,8毫米的行程。 大约是同等级、同型号的传统机械手重量的1/2。 中心口或侧面口都可以作为供气口。 提供传感器开关。(单独出售) 可根据应用从6种类型中选择。 避免了附件的错误放置。 在手指上开了一个定心槽。易于定位附件。 提供了附件。(单独出售) ...

... 高精度。单动平行机械手,可用于内/外抓取。 一体化的各种抓取方式。 各种抓取动作:内抓、外抓、靠空气或靠弹簧力。 独特设计的辊子导向系统。 辊子之间的距离较长,能够实现平稳的移动和抓取。 也可提供抗侧向力矩载荷的E型(带E型挡圈)。 微型机身,但行程很宽。 行业内最小的机身,行程为6毫米。(内部调查) 10mm宽度类型是行业中最轻的。 具有安全抓取功能的小抓手。 单作用机械手,但可以使用常开或常闭,这在传统型号中是不可能的。 节省空气的设计和环境友好。 单动式节省了回程的空气消耗。 有助于节省设备的空间。 单动式,不需要为回程的空气管道留出空间,可以实现紧凑的操作。 避免了附件的错误放置。 在指头上开了一个定心槽。易于定位附件。 提供了附件。(单独出售) ...