

{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
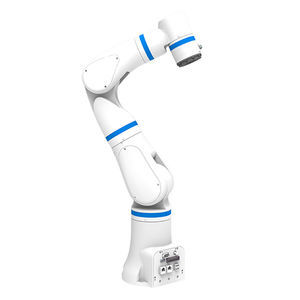
载荷: 3 kg
作用范围: 640 mm
声级: 0 dB - 70 dB
... 概述
BR-R63 Bionic 是一款6轴机器人臂,结合了集成运动控制与轻量化设计,适用于电子制造、3C 装配、精密检测与科研等场景。多自由度关节与高速响应能力支持动态作业与精确姿态控制。丰富的接口和多平台开发支持实现从方案设计到投产的快速集成。
主要特性
- 工作半径:640 mm
- 整机重量:8.5 kg
- 额定负载:3 kg
- 重复定位精度:≤ ±0.05 mm
技术规格
自由度:6
工作半径:640 ...

最大提升速度: 1.5, 1.1 m/s
... 让机械手更自由地移动,实现了物料在不同工位点间的抓取和搬运,减少了固定机械臂使用数量,提升了生产线的灵活性。现已应用于工业、医疗卫生、家庭服务、资料管理等。 自动升降 内部物料自动升降,车身空间高效利用。 性能稳定 完美配合的车体与手臂,性能更稳定。 快速部署 激光SLAM导航,自动规划快速部署 智能调度 自研架构与算法,机器人自由调度 自主充电 自动返回充电,保证随叫随到 ...

载荷: 100 kg
作用范围: 2,500 mm
最大行程: 1,800 mm
... 探索 BPM:工业处理的效率与创新 当今世界,经济挑战要求提高效率、减少对人力的依赖以及提供具有成本效益的解决方案。BPM Manipulators 凭借创新的搬运系统满足了这些需求,这些系统将生产率、安全性和精确性放在首位,而且价格合理,交货迅速。 为什么选择 BPM 机械手? 卓越的人体工程学设计:旨在减少操作员的疲劳,提高工作场所的安全性。 德国品质:精密设计,符合最高可靠性和耐用性标准。 量身定制的解决方案:可定制的机械手,专为应对您独特的工业挑战而设计。 成本效益:在保持精度和产量的同时减少人力需求。 快速交付:快速周转,确保您的运营按计划进行。 价格合理:世界一流的机械手,价格合理。 迎接全球工业的挑战 BPM ...

最大行程: 0 mm - 100 mm
压力: 3 bar - 6 bar
旋转: 0 ° - 180 °
... Unimec旋转机械手具有高速度、高精度和高重复性的特点,可用于电子、微机械、机械、钟表、眼镜和光学仪器、玩具、光学、设备等领域的零件运输和装配,以及调节加工和定位领域的众多应用。 拾取和放下的位置以及运动速度可以独立调节。这些旋转机械手在旋转的末端有液压减震器。它们也有硬质合金行程挡板。 有两种尺寸可供选择。BP66和BP100 旋转臂BP66 BP66:2个位置,用于拾起和放下。 BP1663:3个位置,用于拾取和放下,带中间挡板 旋转臂BP100 BP100: 2个位置,用于拾取和放下。 BP103: ...

载荷: 0.3 kg - 3.7 kg
最大行程: 500 mm - 1,500 mm
... BT-TOP 伸缩臂由 Fiam 设计和制造,可安装在工作台的顶部,其布局符合人体工程学原理,通过沿伸缩臂的垂直轴滑动工具,可轻松完成工作。 它的伸缩行程大,适用于不同的工作区域,特别是那些有横向障碍物的操作空间或在定位夹具上工作的区域。配备的无旋转防转装置可防止机械臂在其轴线上旋转,从而抵消对操作员手臂系统的反作用力。 每个 Telescopi 机械臂都配有一个工具夹,可与各种气动和电动工具(直柄和手枪式)配合使用。 此外,还可以要求提供额外的夹具,以便使用 eTensil 电动螺丝刀或角度工具。 特点 无旋转防转装置 内置平衡器 用于直径最小/最大为 ...