
- 包装 - 物流 - 搬运
- 运输和提升
- 气动夹持器
- VersaBuilt Robotics
气动夹爪 MultiGrip平行双爪用于工业机器人

添加到我的收藏夹
添加到产品对比表
产品规格型号
- 驱动类型
- 气动
- 类型
- 平行
- 爪数
- 双爪
- 产品类型
- 用于工业机器人
- 特性和选项
- 轻型
产品介绍
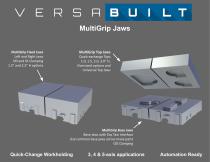
MultiGrip 机械手是一种气动长行程机械手,采用了 MultiGrip 夹具接口。MultiGrip 抓取器与 MultiGrip 虎钳和 MultiGrip 夹爪一起,为数控铣削自动化提供了更多功能。MultiGrip 机械手不直接拾取工件,而是从 MultiGrip 虎钳卸下 MultiGrip 卡爪,使用 MultiGrip 卡爪拾取工件进行加工。 使用工件夹具作为工件夹持器,可实现多品种、小批量的自动化应用,而无需为引入新工件重新编程。
利用虎钳夹爪进行工件传送为数控自动化提供了显著优势:
无需为机器人夹具和数控系统重复夹持工件
允许机械师在数控系统中轻松创建最佳工件夹具
与传统机器人零件夹具相比,可支持更复杂的零件形状
通用操作到操作的零件传送
业内将新工件引入自动化的成本最低
更快的工件转换
提高自动化可靠性
特点
可进行外径或内径夹紧
200 磅夹紧力
重量仅为 1.8 千克,可最大限度地提高机器人部件的有效载荷
2 年保修
---
PDF产品目录


展厅
该卖家将出席以下展会

IMTS 2026
14-19 9月 2026 Chicago (美国-伊利诺斯州) 展会 North Level 3 - 展台 236300






