
... 作用类型 - - 双作用/单作用:常开常闭 工作介质 - - 清洁空气(40pm 过滤) - - 工作压力 - - 0.7Mpa (101.5psi/7 bar) 工作压力 - 0.7Mpa (101.5psi/7 bar) - 工作温度 - PC) - 20~80 (无冻结) 工作温度 - PC) -20~80(不结冰) ...

夹紧力: 97 N - 114 N
运行行程: 4 mm
... 最适合抓取圆柱形工件。 紧凑的机身。 可以安装在一个小的空间里。 由于大型圆形活塞驱动的楔形凸轮机构,实现了高抓取力。 高重复精度:±0.01mm 准备了传感器开关和EOAT(臂端工具)安装法兰(非标准项目)。(单独出售) 可提供适合EOAT(臂端工具)的直接管道。 不需要从抓取器的顶部用螺丝连接供气。 ...

... 高精度(重复性:±0.01mm)。可用于内/外侧抓取的平行抓手。可选择单动/双动和传感器选项。 一体化的各种抓取方式。 各种抓取动作:内抓、外抓、靠空气或靠弹簧力。 独特设计的辊子导向系统。 辊子之间的距离较长,能够实现平稳的移动和抓取。 也可提供抗侧向力矩载荷的E型(带E型挡圈)。 具有4毫米行程的超薄机身。 10毫米宽的机身,结合了8毫米孔径的气缸,可以实现高抓取力。 是窄间距和多工位使用的理想选择。 6毫米行程的短机身。 宽冲程类型可使设备变得紧凑。 超轻的重量,8毫米的行程。 大约是同等级、同型号的传统机械手重量的1/2。 中心口或侧面口都可以作为供气口。 提供传感器开关。(单独出售) 可根据应用从6种类型中选择。 避免了附件的错误放置。 在手指上开了一个定心槽。易于定位附件。 提供了附件。(单独出售) ...

... 高精度。单动平行机械手,可用于内/外抓取。 一体化的各种抓取方式。 各种抓取动作:内抓、外抓、靠空气或靠弹簧力。 独特设计的辊子导向系统。 辊子之间的距离较长,能够实现平稳的移动和抓取。 也可提供抗侧向力矩载荷的E型(带E型挡圈)。 微型机身,但行程很宽。 行业内最小的机身,行程为6毫米。(内部调查) 10mm宽度类型是行业中最轻的。 具有安全抓取功能的小抓手。 单作用机械手,但可以使用常开或常闭,这在传统型号中是不可能的。 节省空气的设计和环境友好。 单动式节省了回程的空气消耗。 有助于节省设备的空间。 单动式,不需要为回程的空气管道留出空间,可以实现紧凑的操作。 避免了附件的错误放置。 在指头上开了一个定心槽。易于定位附件。 提供了附件。(单独出售) ...


夹紧力: 65 N - 700 N
运行行程: 20 mm - 120 mm
... 大夹持力 行程丰富 高刚性 断电自锁 说明 1. 数据来源于25℃实验室实测结果。 2. 如产品需要带刹车功能 , 请联系销售代表获取相关图纸。 3. 本产品手册提供的图纸为默认的标配型号,如需选配不同电机方向、出线方向或出线方式等的其他型号,请联系本地销售代表索取选配型号的图纸。 ...
RobustMotion—Foshan Augmented Intelligence Technol

夹紧力: 150 N
运行行程: 80 mm
... 大行程 大夹持力 防水接头 掉落检测 高精度直线导轨 说明 1. 数据来源于25℃实验室实测结果。 ...
RobustMotion—Foshan Augmented Intelligence Technol

夹紧力: 45 N
运行行程: 40 mm
... 快速开合 稳定可靠 大夹持力 防水、防尘、防腐、防碎屑 说明 1. 数据来源于25℃实验室实测结果。 2. 本产品手册提供的图纸为默认的标配型号,如需选配不同电机方向、出线方向或出线方式等的其他型号,请联系本地销售代表索取选配型号的图纸。 ...
RobustMotion—Foshan Augmented Intelligence Technol


... 由于我们定制的工业夹持管,SIMTECH为您的中空玻璃生产线提供完整的夹持和码垛/卸垛系统。无论您是装瓶商还是机器制造商,我们都能帮助您优化您的技术。我们的技术诀窍是世界公认的,我们提供研究并最大限度地提高您的工艺,以便为您提供定制的解决方案。 每个应用都有自己的限制和要求。无论你的应用是什么,我们的工程办公室将集中精力提供最好的解决方案,以最大限度地提高你的码垛和卸垛的生产率。 通过向我们提供你的应用的技术规格,我们能够定制和调整我们的抓斗管。无论我们的抓斗管的长度、直径、供应接口的数量或添加加固物,我们的产品的定制是没有限制的。它们同样适用于我们的工业码垛机。我们可以调整尺寸、连接或形状。 通过研究并与您分享我们在生产过程中的先进知识和我们的自动化解决方案,我们可以为您节省时间并解决您在生产过程中可能遇到的问题。 我们随时准备为您开发定制的工业抓取管,最好地满足您的期望。 ...

... 电动机械手是现代自动化的明智之选。它们能精确、可控地抓取、定位和释放工件,而且无需外部压缩空气。通过集成的电机和自适应控制系统,抓取力和速度均可根据应用进行调整。因此,可以最大限度地灵活应对各种拾放任务。 电动机械手设计节能,运行维护成本低,是工业环境中敏感或多变应用的理想选择。无论是搬运精密电子元件还是轻型包装单元,GRIP 的电动机械手都能帮助您持续提高生产效率。 GRIPKIT EASY - cobots 的智能抓取解决方案 GRIPKIT-EASY 是用于协作机器人的用户友好型抓取解决方案。该系统专为简单快速地实现拾放应用而开发,性能可靠,操作直观,无需任何复杂的编程。 两个平行的夹爪可以精确地抓取圆柱形或矩形部件。可调节的抓取力和行程使 ...
GRIP GmbH Handhabungstechnik

... 电动双爪平行机械手经过2000多万次循环测试 与气动机械手一样容易控制和操作,这些电动平行机械手是即插即用的,不需要编程、调谐或调整。这些设备只需要3W,可由大多数PLC直接驱动,不需要单独的电源,并且可以用电池驱动,用于远程应用。它们提供了2000多万次的循环,而无需维护这种更高的可靠性消除了停机时间,并提供最低的拥有成本或任何抓取器--气动或电动。内置的电子装置被密封在抓取器内,不需要外部控制板。4针/线控制电缆单独出售。24 VDC,4线输入:电源、地线、开和关信号。100%的占空比,可实现高产量。 安装简单快捷,不需要软件 能源效率高,减少操作成本 比气动抓取器更容易操作和控制 DPE-200-25适用于ISO ...

运行行程: 0 mm - 40 mm
... 工业级夹爪用途广泛,可适应圆柱体、多面体和球体等形状的物体。它可广泛应用于教育、科研、物流、航空航天和安防行业。 最大推荐负载 0.8kg 可调行程 0-40mm 重复定位精度 ±0.02mm 紧凑性 防跌检测 超高性价 ...

... - 紧凑型,可设置多种行程 使用线性导轨的高精密平行开闭方式 自锁功能 (断电时防止工件脱落, 届时可手动拆除工件) 电机驱动内置,可选择外置 RS-485 通信连接器 通过LED信号可确认抓手是否运行完成 ...
JRT

... SofTouch 抓手解决方案由 3 种机器人抓手类型组成,旨在解决直接使用真空不被认为是最佳解决方案的各种搬运和包装任务。 当需要提高质量和稳定性时,SofTouch 真空机械手是机械末端执行器的最佳替代品。非常适合易碎和易留下痕迹的产品,以及不易清洗的热成型或重型包装袋。 每个机器人抓手系列的设计都是针对不同的食品处理和包装任务而开发的,这使我们能够覆盖大多数产品类别。 在该解决方案中,我们将真空技术与脊状部件相结合,使抓取既牢固又轻柔。 此外,产品定制方法使我们能够为具体的机器人任务提供最有效的解决方案。 该抓手解决方案的集成可实现灵活的拾取和放置操作,并将维护需求降至最低。 需要解决更高级的起重任务?让我们为您开发。 与所有机器人兼容 我们的解决方案可安装在所有机器人和协作机器人上。 有效载荷 有效载荷从 ...
Gripwiq ApS

... 完整、易于编程的协作电动平行夹持器,快速开始工作,可用于广泛的应用程序 强大的并行式夹持器,易于部署到狭窄空间,以及应付严苛的有效载荷要求 快速获得 ROI,提供一个柔性、智能并且精准的夹持器,可轻松定制并适应于各种任务 随时随地可用,符合IP67 等级,适用于恶劣环境,通过 ISO 5 级认证,适用于洁净室使用 OnRobot 2FG7 是一个功能齐全的、低成本、现成的电动并行式夹持器,可以在几分钟内完成部署,而无需定制安装、编程或维护的工程。2FG7 易于重新部署到大型或轻型工业机器人,非常适合小批量的多品种生产,用于各种不同的应用时,可快速实现 ...
OnRobot ApS

... 我们提供SoftActuators,您选择底座的形状。无论你喜欢铝制结构型材还是弯板,这些都是为你量身定做的。我们经过验证的气动手指是由FDA批准的硅橡胶制成的,使用寿命超过1000万次。你可以把它们安装在每一个EOAT设置上,而不需要得到一个特殊的底座。我们的SoftActuators采用卫生设计,易于清洗。 使用场合。 对于想建立自己的EOAT的工程师来说 适用于大量的物体 当抓取对象发生变化时,易于调整 在设置中,便于进行原型设计 确定固定系统的最佳尺寸 为了获得最大的灵活性和可变性,我们提供三种不同的SoftActuators。 1-手指软推杆 双指软推杆 3指软推杆 如果你需要一些特别的东西,如4个或更多的手指,或手指距离更大或更小的推杆,只要联系我们,我们会在2周内为你制造。 ...
SoftGripping


夹紧力: 300 N
运行行程: 65 mm
... 高精度力控,±0.3N 力、位、速度都可以通过Modbus精准控制 长寿命:千万次循环,超越气爪 控制器内置:占用空间小,方便集成 控制方式:485 (Modbus RTU)、I/O 传动方式 - 精密行星减速机+滚珠导轨 运动元件油脂补给 - 每六个月或者动作一百万次/回 单向行程运动最短时间 - 0.7s 运动方式 - 二指平动 重量 - 1.65kg 尺寸规格 - 90*90*115mm 工作电压 - DC24V±10% 额定电流 - 0.8A 峰值电流 - 2A 功率 ...
Huiling-tech Robotic Co., Ltd.
夹紧力: 140.61 kgf
运行行程: 14 in
... 用于大部件和长行程的平行钳口运动 LPG 系列是 EZ 系列线性滑轨的改进版,用于抓取。这些夹具有多种配置,可支持重负荷和大型工件。工具栏以绝对的平行度和精确的同步运动相互伸出和缩回。该系列的中心定位精度在 0.002 英寸重复精度范围内,几乎可以实现 "无间隙 "抓取。 主要规格 特点 - 提供 1 ⅛ 英寸和 2 英寸内孔尺寸 - 工作压力标准为 100 psi - 工作介质:压缩空气 - 中心定位精度在 0.002 英寸重复精度范围内 - 可调节的夹钳卡爪止动装置 技术优势 - 最大气缸抓取力为 ...
FABCO-AIR

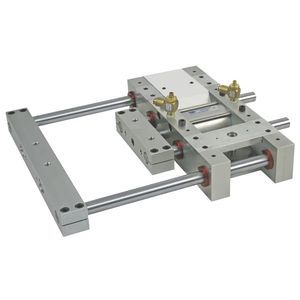
夹紧力: 51 N - 1,024 N
运行行程: 50 mm - 500 mm
... EPS mini YZ •紧凑型装卸装置,宽度仅为 40 mm •节省能源和成本的装卸装置 •气动装卸装置的一个灵活选项 EPS midi YZ •紧凑型装卸装置,带有冲程最大为 500 mm 的 Y 悬架 •坚固的悬架模块 ES30,峰值力为 255 N •轻型垂直模块 ES20,适用于高动力 EPS maxi YZ •坚固、强劲的悬架系统 •动力强劲,即使在较高负载下 •接合力最高为 255 N 的垂直模块 EPS giga YZ •坚固的滑动轮廓可完成精确的压入作业 •快速移动有效载荷可达 ...
Afag

运行行程: 24 mm - 90 mm
... MCB 双气动夹瓶器系列适用于长颈瓶或短颈瓶。它的双环外形意味着它可以覆盖更大的直径范围(12 至 45 毫米)。它被广泛用于避免在两种瓶子之间更换夹具。实际上,只需改变夹具之间的间距即可。 我们的气动夹瓶器系列由 NPVC 涂层织物在我们的车间制造,并在高压釜中通过热硫化进行组装。 标准长度有两种:1320 毫米和 1460 毫米。此外,我们的设计部门还可以为客户量身定制产品。例如,可根据要求在双气动夹瓶器上添加食品安全涂层。此外,根据您的要求和托盘装载机头的不同,充气环还可配备加强筋、双气源、螺纹环高度等。 优点 使用方便 ...
PRONAL


... 适用于各种产品的完美抓手 搬运物体是机器人系统的核心任务。所使用的机器人抓手能精确地适应物体的特性--抓手技术是在 TRAPO 技术中心开发和测试的。 使用 TRAPO 开发的最佳抓手对于持续提高性能和质量至关重要。 机器人成功的关键在于个性化的抓手技术 TRAPO AG 通过输送系统、机器人和定制抓手技术的完美结合,为内部物流任务的智能自动化提供了最大的灵活性。针对特定产品的抓手技术使机器人系统的应用可能性、功能和性能更加完美。 多功能组合机械手 这些 组合式机械手结合了真空机械手和机械手的性能。在需要完成多项任务或空间有限的情况下具有决定性作用。 空间有限。它们适用于不同的产品,还能抓取托盘、工件载体、中间层或盖子。 机械抓取机 ...

... 针对具体项目定制 强大抓持力设计 维护要求低 便于维护的设计 桁架机械手结构紧凑 抓取时运行可靠性高 抓取精度高 高耐用性 桁架机械手驱动方式客户可定制 ...


夹紧力: 20 N - 185 N
运行行程: 50 mm
... 你最喜欢的抓取器变得更好了!我们保留了外形因素,并改进了内部组件。结果呢?一个更强大的Hand-E,增加了有效载荷和更好的保证。 协作机器人的抓手 即插即用,易于编程 高精度和宽行程 是精密装配任务的理想选择 为工业应用和恶劣环境而建 应用 Hand-E的高精度和50毫米的平行行程使其成为精密装配任务的完美选择,而其密封设计确保了在最恶劣的制造条件下的可靠性,包括CNC加工。Hand-E的设计符合ISO/TS 15066标准的最佳做法,其最大的力、圆形边缘、自锁功能和其他特点使其成为协作机器人的抓手。 Hand-E的特点 为协作型机器人而建 ...
Robotiq

... 产品最终包装自动化解决方案的成功与否,主要取决于各抓头系统与客户产品的匹配程度。为了确保最佳的处理效果,project A&E 提供了各种抓头 - 以下是概述。 PROGRAB J100 是用于码垛层的多功能盲板抓头。百叶窗打开时,抓头在一层产品上方移动并降低,利用伺服驱动的对中条将产品对中,然后将产品推离传送带。百叶窗在产品位置下方与推动速度同步关闭。 ...
Project Service & Produktion GmbH

夹紧力: 670, 624 N
运行行程: 8 m
... 配置选项: S: 短冲程 B:底部通风 P: 防尘盖 IP64 NO/NC: 自锁形式 H: 耐高温 对于标准气动两指机械手,富克采用了高强度材料和强耐磨的表面处理工艺,保证了产品使用的可靠性和使用寿命。同时,它还具有丰富的可选接口,以适应各行业的复杂工况。 ...
Hangzhou FOUK Mechanical Technology Co., Ltd.