
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

夹紧力: 5 N
... SoftGripper重量轻,易于操作,没有锋利的边缘。我们的抓取器的核心是手指。它们能适应任何物体的形状而不损坏其表面。其主要优点是重量轻、速度快,能够处理各种食品。我们的气动手指是由FDA批准的硅橡胶制成。我们保证在1巴压力下的使用寿命超过1000万次。 适配器可用于市场上的每个机器人。要抓取的物体的形状决定了底座,它是抓取器的一个重要部分。圆形物体需要一个居中的底座,细长或长方形的物体需要一个平行的底座。我们提供不同类型的基座,有不同数量的手指和不同角度。 对于特殊应用,我们很乐意在最短的时间内为您的任务设计一个完全个性化的底座。你会惊讶地发现,由于SoftGripper的灵活性,它可以安全、轻松地处理各种物体。因此,没有必要为不同形状的物体配备不同的抓手。此外,一个真空吸盘或一个垫片可以集中安装。 ...
SoftGripping

夹紧力: 74, 68 N
运行行程: 4 mm
... 配置选项: B:底部通风 C40: 推杆长度 H: 耐高温 气动四指定心抓手采用 T 形承重结构,可支撑不同的推板,其淬火弹簧的使用寿命超过 500,000 次。四指抓手的抓取力均匀,可稳定抓取物体,防止损坏。 ...
Hangzhou FOUK Mechanical Technology Co., Ltd.
夹紧力: 770, 1,330, 2,400, 4,130, 7,500 N
运行行程: 21, 50, 111, 217, 477 mm
... - 工作压力范围:2 - 8 bar - 重复性精度。PFP-75...110 0.02毫米;PFP-145...185 0.05毫米,100次以上。 - 操作温度:从-10°C到90°C;根据要求,最高可达130°C的版本 - 工作原理:楔形钩的运动学原理 - 外壳材料:高强硬涂层铝合金,硬阳极处理 - 功能部件的材料:经过处理的研磨钢 - 驱动:气动,使用过滤的压缩空气(10 μm):干式、润滑或无润滑(DIN ISO 8573-1: 644)。 - 维护:前150万次循环不需要维护 - 适用于内部/外部抓取 - ...
OMIL

... 介质转移(拉杆/夹持器) 根据客户的要求,可以从主轴末端传输一个或多个介质(驱动和/或旋转电源到前端 HSK、SSK 或可乐满 Captot 接口。 ...

... 四指自定心夹具,孔径可达 Ø30.5mm。有 3 种尺寸可供选择。 最高温度 - 130°C 特点 - 弹簧压板 ...
Robot System Products AB

夹紧力: 4 N
运行行程: 5 mm - 6 mm
... SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 Wb - 128 Wn - 20 Wm - / Hb - 200 Gn - 16-145 Lb - 68.2 Lt - 62.7 Ln - 34.2 L - 19.2 Gn+2Smax - 16-155 负载 g - 1160 产品重量 ...
Soft Robot Tech Co.,Ltd

夹紧力: 52 N
运行行程: 10 mm
... 优势 紧凑-轻量-快速 无声机制 快速、简单的整合 大开口角度 位置传感器 效益 无需维护 循环时间非常短 卓越的功率/体积比 低空气消耗 CHW230系列抓取器在紧凑的设计中提供了长行程和强大的抓取力。 课程----10毫米 空气消耗量----100毫米³ 功能 - 双重功效 每分钟最大循环次数--60次 夹持力* - 52.0 N 重量 - 0.37公斤 从手指端到附件的最大长度--30毫米。 一个附件的最大重量 ...

... 食品安全材料。通过FDA和EC-1935认证。用于水果、面团、糖果、糕点和蔬菜的采摘和放置。 食品包装应用: -环形抓取器,适用于球形或方形糖果、糕点或水果。 食品包装应用: -线型手指抓取器,适用于条状、橄榄形水果、食品等。 ...
Suzhou Rochu Robotics Co.,Ltd
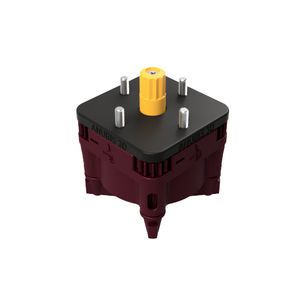
运行行程: 20 mm - 42 mm
... Anubis 3D第二代外部机械夹钳在已经很好的产品基础上进行了改进,以满足您所有的瓶、罐和容器的取放需求。其设计是使用4至8个齿轮驱动的夹子组合,独特地锁定在瓶、罐或容器的颈部,以确保产品的快速运输。 我们的系统被设计成由一个简单而精确的气动齿轮和齿条驱动,可以适应几乎任何产品阵列。 通过改造您过时的漏气真空和气动式抓取器,消除昂贵的生产线停工时间。Anubis 3D机械抓取器的设计具有重量轻、能源效率高、成本效益高和可靠等特点。 Anubis三维机械抓取工具(EOAT)是根据您的要求设计的,无论是改造还是新的抓取应用。我们的抓瓶器EOAT可以被配置成任何模式。每一行都是由高质量的线性气缸通过齿轮和齿条系统驱动的。 - ...

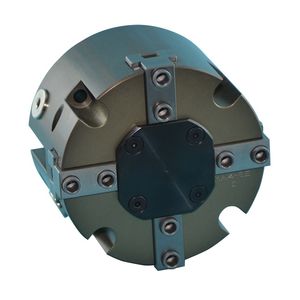
运行行程: 7, 10, 9 mm
... 作为手动卡盘的基本型,可适用于异形工件。 ■四爪双驱动卡盘;可双向夹紧异形工件;还提供四爪单驱动型产品。(CKD) ■无需兼容调整;因为卡爪的工作行程较长,无需调整。 ■紧凑、强力;主体部分采用操作简便的轻量、紧凑型设计。 ...
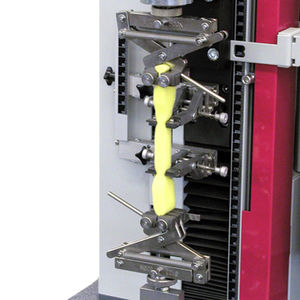
夹紧力: 0.5 kN
... 这些试样夹具主要用于测试高延展性塑料、弹性体和橡胶。钳式夹具原理是在测试期间产生一个急速增加的夹持力。 通过与拉伸力成比例增加的夹持力使试样夹持牢固 钳式夹具的横向移动确保加载试样时始终对中试验轴。 采用人机工程学和开放式设计,可快速、方便地插入和夹持试样 由于质量非常低,夹具在环境试验箱中易于操作,并且很快达到试验温度。 钳式夹具是双作动缸夹具。钳式夹具通过夹持杠杆打开和闭合。 预应力弹簧保持试样夹具处于打开状态,以插入试样。如果试样夹具闭合,则预应力弹簧产生所需的夹持力。 根据钳式夹具原理,夹持力随着拉伸力的增加成比例增加。这可确保容易收缩的试样自动重新紧固。 ...

... TMS容器夹持夹具适用于在消费者包装容器或其他收集容器中分析半固体或浓稠液体样品的测试。 四个软握橡胶臂可牢固地固定直径从10mm到70mm的容器。这对于测试粘性液体的回程(拉伸)周期内的粘性测试至关重要,因为在测试过程中,需要防止提升。 将样品放置在提供的容器内,在对浓稠液体进行挤压或渗透测试时特别有用--夹头消除了将产品转移到不同容器中时因扰动产品而产生的变化。它还可以通过省去额外的步骤,加快测试过程。 应用 对原容器中的粘性浆料和液体进行挤压和渗透试验。 对半固体或粘性产品的附着力(粘性)测试:酸奶 ...

运行行程: 600 mm
... 当不需要从难以触及的区域回收磁性小部件时,可使用爪式抓取器。除了磁性提升器之外,爪式抓取器还有一根灵活、排列整齐的钢轴和一个坚固平滑的爪式机构,爪子经过硬化处理,可以经受长期的专业要求和微调。它有不同的尺寸,既可以单独使用,也可以成套使用。 镀镍,长型 600 毫米 长度 600 毫米 重量 75 克 ...